K-D tree入门
KNN问题
K-Nearest Neighbor,我也不知道应该说是问题还是算法,也就不要管这个了。我们想象这样一个场景,在一个平面直角坐标系上面,有很多很多个点。现在我们随机地选择一个点,想要知道离他最近的$k$个点是哪些,怎么办。如果使用肉眼观察的话,那么我们是可以大致判断出来有哪些的。可是在很多时候,我们拿到的并不是图像,而是数据,而这些数据要让计算机来处理,怎么办??
对于这一个问题,我们可以用时间复杂度为$\Theta(n^2)$的方法,处理出所有的距离,询问到处理的距离里面来看,但是我们还可以有别的方法。
K-D tree
概念
K-D tree 是一棵二叉查找树,它可以用来维护有多维信息的数据。因为在做题的时候,遇到的一般都是$2$维,所以说下面的例子我就以二维的来看了
建立
解释
平常的二叉查找树,建立的时候,在每一个中间节点,会比较值的大小,比他小的就到他的左儿子那边,比他大的就到他的右儿子那边。但是K-D tree 有多维信息,这种情况下应该怎么办?既然他是有K维的信息,那么我们就任意选择其中以为来进行分割就可以了。这就好像是在平面中画了一条线一样,将它们分成了两个部分
比如下面的这一个,这是一个这个平面上有很多点,我们先选取其中一维进行分割,分成了两块,然后我们换一维继续分割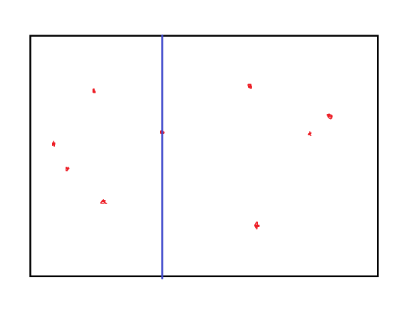
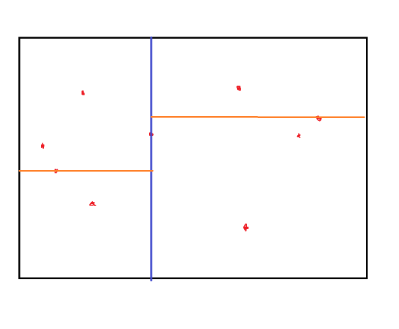
就这个样子交替分割下去就可以了,听着是不是就像切蛋糕一样?
那么怎么来进行分割呢,有下面两种方法:
- 根据深度,轮流来选择一个维度,依据这一个维度来进行划分。在划分的时候将区间内的值依照这一维的大小来进行排序,然后将中位数存下来,然后再递归的处理
- 我们计算一下每一维的方差,然后选择方差最大的那一维来进行划分。为什么要这样来进行划分,举个例子,如果说是一块方方正正的豆腐,那么不无论选择那一维来切,效果都是很好的。但是呢,如果说是一根细长木条呢?你轮流切未必就有一个好效果。选择计算每一维的方差,选择方差最大的那一维来的话,能够在构建树上起到很好的效果。
(假)代码
首先,我们需要一个结构体
1 | struct K_D_Tree{ |
其中$node$是用来储存信息的结构体,然后来看看第一种方法如何来进行$build$
1 | int build(int L,int R,int deps){ |
这里$pushup$这个函数在接下来会讲,所以说先看着。nth_element 这一个函数第一个和第三个参量是左右区间,左闭右开,而中间的这一个则是你要排的值。像是上面代码中的那个例子,在point+mid这个位置,一定就是这个区间的中位数,前面都比它小,后面都比他大,但是前面后面未必就排好了序。
第二种方法(假代码)
1 | for(int i=0;i<maxk;i++){ |
查询
K-D tree 的K近邻查询
我们之前提到了,要查询离某一个节点第$k$远(当然也可能是第$k$近)的节点的编号,或者是这一个距离。首先,这个第$k$远怎么办,怎么来记录,这个时候就可以想到优先队列了,每一次询问的时候,我们在优先队列里面先$push$ k个值进去,然后呢,查询的时候,遇到符合要求的数值,就把队首$pop$出来,然后再$push$进去,这样就可以保证我们总是维护好了第$k$远或者第$k$近了。
接下来来谈一谈如何查询,首先我们遍历到某一个节点,然后计算一下这一个节点和目标节点之间的距离,看看这一个距离是否符合要求,如果符合我们的要求,那么我们就更新一下,接着,以目标节点作为圆心,现在的答案的距离作为半径,然后做一个圆(三维的情况下是一个球,如果更多的话,那么就是超球体了)然后看看这一个圆有没有和我们遍历到的节点划分的左右平面(多维的话,按照网上的叫法就是超平面了)相交。如何判断?我们计算一下目标节点到左右平面的最小距离(注意,这里是在说第k近的情况),如果说这个距离要比我们现在所说的这一个答案要小的话,那么就到这个平面里面去搜索,而如果是第k远的的情况下面,就是计算最远的距离是多少,然后再来判断了
可是现在还有一个问题,怎么来确定离左右平面的距离?这个时候就可以记录下每一个节点的子树下面,某一维最大最小的值是多少,建立的时候$pushup$一下,计算的时候就可以用了
1 | struct node{ |
如果是计算最远的距离的话,那么每一维直接就是求距离的公式累加起来就可以了,最近的情况下面,则是如果处于最大最小区间以内,则是不用加,否则这一维取最小的来
用图片来表示的话,大概就是这样
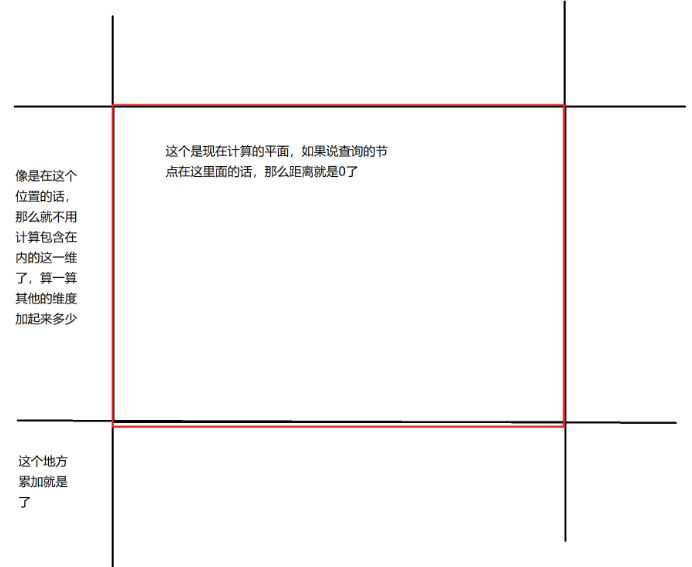
上面的图就分别对应了第$k$近和第$k$远了
1 | inline double getrange(int p,int pos){ |
1 | inline ll disrange(node pos,int nowp){ |
数据类型不一样是因为不是从同一道题目上摘下来的,不要在意
那么这样一来,查询的代码就差不多可以写出来了
1 | void query(int L,int R,int p){ |
这里就只写贴一个查询第$k$远的了
K-D tree 的查询时间复杂度据说是 $\Theta(\sqrt N)$
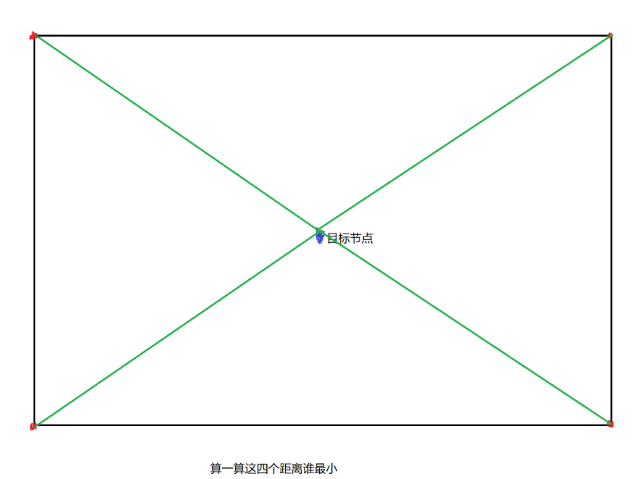
但是在某一些情况下面,它的时间复杂度还是会退化到接近$\Theta(N)$来,比如说
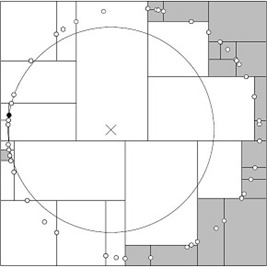
所有的节点分布大致构成了一个圆,而你查询的节点差不多就是在圆心位置。
当然,设节点数为$K$,维度为$D$,只有当$K >> 2^D$的时候,K-D tree的效率才可以保证,当然,维数如果说高了的话,效率也是无法保证的。想K-D tree这样可以解决多维信息的树还有别的,比如说球树等等,我就不说了。因为我不会用。而如果想要解决更高维的信息,还想要保证效率的话,那么还有一种方法
BBF 算法
首先,我们需要另外一个优先队列。同时还需要一个对回溯次数限制的值,这个值是依据大量的结果取定的,我也不知道应该给你一个多少比较好。这个$BBF$算法的核心就在于决定一个优先级和最大回溯次数。这个优先级还是之前所说的距离来当。每一次查询到某一个节点的时候,还是计算出左右儿子和目标节点距离,然后进入其中一个查询,把另一个连同树上的位置和优先级一起放进优先队列里面来。然后查询一直到达叶子结点。如果队列不为空且没有到达最大回溯次数,那么就从队列里面拿出队首来进行查询。
插入,删除和重构
插入
这个时候,到达某一个节点,然后根据这个节点划分的维度,依次往下去,知道叶子节点为止,然后加上来就可以了
1 | void insert(int now,node p,int deps){ |
差不多,就这样吧……
删除
K-D tree的删除操作,对于没有后继节点的节点,那么就直接删除了就好,但是如果说有后继节点的话,你就从它的左子树中,找出这一维最小的那一个值,或者是右子树中找出最大的那一个值,然后再把把那一个值从原来的树中删除了……这是一个递归实现的过程。
重构
当插入删除操作进行了一定次数以后,重新用一次$build$就好了。当然也可以类似替罪羊树那样,选择一个规定的$\alpha$,如果说不符合要求再使用一次$build$,不过我觉得还是一种方法更好